Abstract
The RMT method (R-Matrix with time-dependence) is a new ab initio method for solving the time-dependent
Schrödinger Equation (TDSE) for multi-electron atomic and molecular systems in intense short laser pulses. Although
several other time-dependent R-Matrix methods have been introduced in recent years [1, 2, 3, 4, 5, 6], RMT
demonstrates orders-of-magnitude improvements in efficiency, primarily because it employs finite-difference (FD)
techniques to model the few-electron wavefunction far from the atomic core. RMT merges the Outer Region FD model
with a classic B-Spline R-Matrix basis set for the multi-electron Inner Region [7]. The difficult problem of merging a
basis set model with a spatially adjacent FD model, while maintaining the unitarity of the time-propagator, has been a
long-standing barrier to progress in this field. RMT is based on the solution first published in 2008 by Nikolopoulos,
Parker and Taylor [8]. We have now shown that this method is both computationally stable and highly efficient.
An implementation of RMT has now been completed and parallelized on workstations, mid-sized parallel machines and
on HECToR. Success was due to the use of a mature R-matrix parallel code for the Inner Region, and the use of the
HELIUM finite-difference code for the Outer Region [9, 10]. HELIUM [11, 12] has been in heavy use on massively
parallel machines since the arrival of the original Cray T3D over 15 years ago. It allows accurate full-dimensionality
solutions of the time-dependent Schrödinger equation for two-electron atoms or ions in intense fields. It has
demonstrated high parallel efficiency on massively parallel processors, with production runs on over 16,000 cores of
HECToR, and successful tests on over 60,000 cores of Jaguar, HECToR’s sister computer at Oak Ridge. It has
performed well in similarly rigorous testing on the IBM Blue Gene architecture. It is regularly used on single
processor machines, 8-core workstations, clusters of workstations, and large Beowulf-type workstation
clusters.
HELIUM was designed to generate high-integrity solutions of the full TDSE for laser-driven 2-electron atoms.
Experience with HELIUM demonstrates that a very basic requirement for high accuracy results is the use of large
integration volumes - in other words the use of Outer Regions of 1000’s of Bohr radii in extent. Attempts to truncate the
integration to boxes of much smaller radii invariably produced unacceptable and difficult to detect integration
errors. Of equal importance is the fact that the basic problem of calculating the energy spectra of ejected
electrons is intractable without a high-accuracy treatment of the wavefunction for these electrons as they
travel far from the nuclear core. For this reason, the HELIUM finite-difference approach and HELIUM
algorithmic methods for the propagator are considered mandatory if the RMT method is to generate solutions
of the TDSE comparable in accuracy to those obtained by HELIUM for purely two-electron systems.
Over the last 5 years, remarkable advances in laser technology have enabled experimental study of matter-laser
interactions with unprecedented time-resolution. Experiments can now be performed using few-cycle pulses of
high-intensity Ti:Sapphire laser light at 800 nm wavelengths, and at Vacuum-Ultraviolet wavelengths (VUV) with
pulses as short as 250 attoseconds. The creation of attosecond pulses in particular has opened up a new frontier in the
study of ultra-fast electronic processes. Recent landmark attosecond spectroscopic measurements in a solid [13] have
demonstrated that ultra-fast techniques can probe solid state processes occurring at the theoretical ultimate speed limit
for electronics. Attosecond pulses have recently enabled the real-time observation of electron tunnelling in atoms [14]
and Auger decay of inner-shell electrons [15]. Attosecond pulses have also enabled stroboscopic study of single
ionization events in argon [16].
Interactions that occur over a few cycles of the laser pulse, either due to the extreme intensity of the pulse, or due to the
short duration of the pulse, cannot be reliably modelled with traditional time-independent methods. If theory is to play a
meaningful role, and especially a predictive one, in such circumstances, then sophisticated methods of calculation are
required which will be capable of accurately describing both the multi-electron atomic structure and the time-dependent
multi-electron response to the light field.
R-matrix methods successfully model multi-electron atom-laser interactions, and molecule-laser interactions, but only
in the time-independent limit. HELIUM successfully models time-dependent atom-laser interactions, but is limited to
2-electron atoms. RMT removes both of these limitations. Through the use of the R-matrix method it allows a truly
multi-electron dynamical description of the Inner Region near the nucleus where all the electrons of the
system can be found. This is important because in the high-frequency limit, (VUV and XUV (extreme
ultraviolet)), inner-shell excitations can be expected to influence or dominate the interaction. The use of
finite-difference methods derived from HELIUM provides a high accuracy description of the Outer Region of
space which, although very large in comparison to the Inner Region, is accessed by at most two electrons
in double ionization processes (just a single electron for single ionization). Of equal importance to the
success of RMT is the high efficiency and scalability on parallel computers of the HELIUM approach.
In summary, the goal of RMT has been to enable theoretical analysis of recent experimental advances with a degree
of reliability that would be impossible by competing methods. These include time-resolved studies of
ionization events in attosecond time-scales, studies of time-delays between the ejection of electrons in
double-ionization, inner shell excitations and decays in complex atoms, intense-field atom-laser interactions in the
XUV limit using the new free-electron x-ray lasers, and harmonic generation in atoms and molecules.
In section 2 we discuss the goals and outcomes of Work Package 1. The objective of Work Package 1 was to develop
and test a series of optimizations for efficient load balancing of the RMT Inner Region (I.R.) with RMT Outer Region
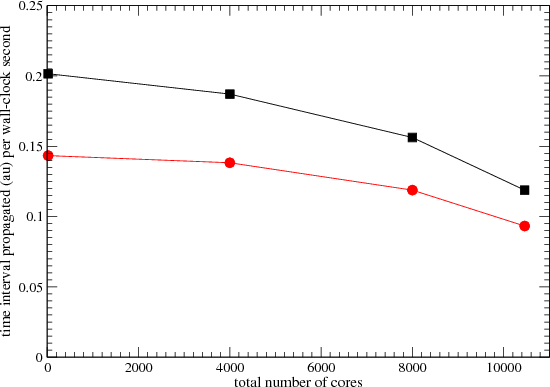
(O.R.). Figure 1 and related text discuss the scaling laws and benchmarks used to choose optimal parameters for the
balanced execution on jobs in the 100-10,000 core range. Tests were performed on configurations with 100-1000 I.R.
cores, and 100-10,000 O.R. cores.
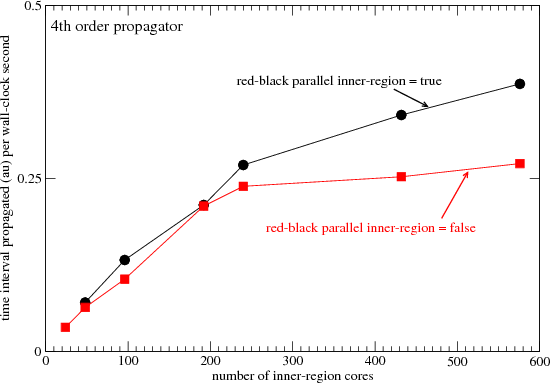
Figures 2 and 3 and related text discuss an optimization that modified the order of communications between the I.R. and
the O.R.. We call this the Red-Black optimization, and demonstrate a case in which it gives us a factor 1.7 increase in
integration speed, in the limit of greater than 500 I.R. cores. We remark that the result of this optimization is fortuitous:
with the addition of 340 cores to the I.R., it is for example possible to increase the speed of an 8,000 core program by
70%.
We describe 2 additional successful optimizations: 1) moving computation from the O.R. to the I.R (thereby reducing
the information exchanged between the regions each time-step), and 2) the assignment of a single dedicated core to
inter-region communication. Together these optimizations gave a significant speed-up, as shown in Figure 1. We
investigated upgrading the present MPI design with potentially faster MPI collectives, but the MPI collectives
were rejected due to incompatibilities with the complicated MPI methods used in the Red-Black scheme.
In section 3 we discuss the goals and outcomes of Work Package 2. The objective of Work Package 2 was to implement
an algorithmic enhancement to the propagator in order to improve efficiency in the limit of small spatial grid-point
spacings. The original proposal involved exponentiating an approximation of the Hamiltonian, but the computational
overhead of this approach exceeded the improved efficiency. Instead we developed a method based on
least-squares finite-difference operators that successfully produced the desired improvement in integration speed.
In section 3 we show that the least-squares finite-difference methods retain the accuracy of the original
5-point finite-difference rules, but improve stability by suppressing the highest frequency modes on the
finite-difference grid, thereby allowing larger integration step-sizes and integration speed. We present the results of
an integration in which the least-squares rules increase integration speed by a factor of 1.8 over that of
the standard 5-point finite-difference rule, exceeding the original goal of a 50% improvement in speed.
We begin with a brief account of how HELIUM methods addressing the few-electron Outer Region are combined with R-matrix basis set methods handling the multi-electron Inner Region. We write in the Inner Region I where all electrons can be found:
|
| (1) |
where ψk(r1r2...rN+1),k = 1,K form a field-free, time-independent R-matrix basis for the (N + 1) electrons
within the Inner Region with outer boundary at r = b. The construction of the ψk is the responsibility of
long-existing atomic R-matrix time-independent codes. The time evolution of the Inner Region time-dependent
wavefunction is entirely contained in the coefficients Ck(t) whose time evolution is determined by the TDSE.
However in writing the TDSE we must take care that the Hamiltonian and dipole operators which act on
ψI(r1r2...rN+1,t) are Hermitian over Inner Region I (where ψI(r,t) is only defined). The Hermitian Inner Region
Hamiltonian is given by HI = H0 +  h and the dipole operator by DI = D +
h and the dipole operator by DI = D +  d, where
d, where  h and
h and  d are Bloch
surface terms, only non-zero at r = b. In these circumstances the TDSE over Inner Region I is written:
d are Bloch
surface terms, only non-zero at r = b. In these circumstances the TDSE over Inner Region I is written:
![dψI [ ]
i----(r1r2...rN+1, t) = [HI + DI(t)]ψI(r1r2...rN+1, t) - ˆLh + ˆLd(t) ψ(r,t),
dt](rmt_report_2011_65x.png) | (2) |
where 0 ≤ r ≤ b.
This equation is a key one to the method. The second term on the right hand side compensates for the Bloch terms
introduced to make HI and DI Hermitian. Note that it makes a contribution only at r = b and brings into play there
ψ(r,t) a one-electron wavefunction form which we define from just within the Inner Region outwards. This term is
central to any time propagation scheme in Inner Region I because it connects the wavefunction form ψI(r1r2...rN+1,t)
specific to that region with a wavefunction form that at r = b represents a single electron and which in calculations is
obtained from Outer Region II.
The Outer Region II is spanned by a finite-difference (FD) grid so that the one-electron wavefunction there is written
 | (3) |
with i = ib,..,I and r(ib) = b. In this form, for simplicity of presentation, we have allowed for only one residual ion state of the system. The form the TDSE takes in this Outer Region is then
![f˙l(i,t) = - i[H ⋅F ]l(i,t)+ δiib [B0l(ib - 1,t)+ B0l(ib - 2,t)]+ δiib+1B1l(ib - 1,t).](rmt_report_2011_67x.png) | (4) |
This, the second key equation to the method, is the normal form of the TDSE over a FD grid except for the terms
multiplying δiib and δiib+1. Note that these terms require quantities (the Bs) to be evaluated at grid points ib - 1 and
ib - 2 i.e. at points on the inner side of the boundary at r = b. This reflects the use of 5-point difference operators on the
FD grid.
We emphasize how Eqs. (2) and (4) are actually used by sketching the computational procedure in propagating the full
wavefunction through one time-step from t to t + τ. We first consider the Outer Region TDSE, Eq. (4). This is handled
by the explicit Arnoldi time-propagator method [11] as in HELIUM and brings into play Inner Region information
through the B0l(ib - 1,t), B0l(ib - 2,t) and B1l(ib - 1,t) terms all known from time t. Having thus determined all the
fl(i,t + τ) for i = ib,..,I we proceed to the Inner Region. What we need to determine here are the coefficients
Ck(t + τ) and again these are determined by the explicit Arnoldi time-propagator using knowledge of the Outer Region
fl(i,t + τ) to determine the spatial derivative terms at r = b brought in by the non-zero Bloch operator terms
there.
Attempts to create efficient time-dependent R-matrix integrations for such large volumes have made slow progress,
largely because successful integration of the relevant high-dimensional partial differential equations is so
computationally demanding that it requires the benefit of parallelization over tens of thousands of cores, which is not
straightforward in pure R-Matrix formalisms.
To enable the RMT code to run efficiently on HECToR, this work package focused on improving load balancing among
the cores, and improving the efficiency of communications between cores the Inner Region (I.R.) cores and Outer
Region (O.R.).
Load balancing concerns minimizing the idle time of HECToR cores during the run. As the computational algorithms
implemented by cores in the Inner and Outer Regions are vastly different, the computational effort it takes to propagate
the wavefunction forward one step in time will be different in the two regions. Therefore for the RMT
code to run efficiently on HECToR it is imperative that an understanding of the relative computational
effort between Inner and Outer Regions is built up through experience of running the code for different
conditions. In the Inner Region (I.R.), the propagation forward in time involves a matrix-vector multiplication.
The matrix has a block tri-diagonal form; the blocks consist of matrix elements coupling two values of total angular
momentum. The I.R. is parallelized over these block structures, so that for total angular momentum ranging from zero
up to some maximum value, the minimum number of cores used will be that value plus one. Each core then handles a
sub-section of the matrix-vector multiplication.
In the Outer Region (O.R.) the computation is a domain decomposition over the grid points. Each core handles a
segment of the wavefunction, and stores it in an array of dimension Ngrid × Nchannels where Ngrid is the number
of grid points and Nchannels is the number of channels. The number of channels is dependent on the
value of total angular momentum and the number of residual target states retained in the calculation.
Given the value of total angular momentum and the number of residual target states there should be some optimal value
of grid points per core that will best balance the computation performed by the cores in the two regions. The
desired values of the total angular momentum and the number of residual target states are dependent on the
scientific problem at hand. To give an indication of the types of problems we anticipate studying with RMT,
consider the neon atom. Neon has a multitude of residual ion target states that are very close together in
energy: retaining 8 (21) of these and allowing angular momentum values up to 24 (30) gives around 500
(1500) channels and an I.R. Hamiltonian of dimension 25000 (120,000). To propagate the wavefunction
accurately over the course of an intense 10 cycle infra-red laser field would require a radial grid extending
as far as 20,000-35,000 Bohr radii. Sometimes it is necessary to resolve resonance structures: in these
extreme cases, integration over many (greater than 100) field periods becomes necessary, and consequently
the radial grid must extend further by one to two orders of magnitude. We estimate that these types of
calculations would require 100-1000 cores to handle the I.R. and 200-10,000 cores to handle the O.R.
Load balancing on 200-10,000 cores
We turn now the problem of choosing optimal parameters for balanced computation in the practical limits RMT was
designed for. Of special interest is the case in which the outer region (O.R.) encompasses core counts as high as 10,000.
This is expected to be a typical core count in studies of intense-field harmonic generation studies, one of the original
motivations for the creation of the RMT method.
In this section we test O.R. core counts in the 100-10,000 range, with inner region core counts fixed to 100 cores. In the
following section on the Red-Black optimization, we explore varying the I.R. core counts up to 1000 cores.
We start with the general problem of balancing the workload between the inner region (I.R.) and outer region for
arbitrary configuration of the R-Matrix inner-region. If the O.R. cores complete their computation too quickly, then they
sit idle, waiting for the I.R. to complete. If the O.R. cores have too much work to do per time-step, then the I.R. cores sit
idle, waiting for the O.R. to complete. Notice that if the O.R. cores outnumber the I.R. cores by 100 to 1, (a not
uncommon case), then I.R. idleness is not very expensive computationally - preventing O.R. core idleness in this limit is
the top priority for efficiency.
Parameters defining the R-Matrix I.R. are for the most part constrained to certain values by the physics of the problem.
The only easily adjustable parameter is the outer region parameter governing the number of grid points per core: Ngrid.
It is straightforward to calculate a good estimate of Ngrid based on knowledge of the run-time scaling of the I.R. and
O.R. as a function of several program parameters. To first approximation, the run-time overhead per time step of the
inner region scales as
runtime_per_step = cinnerNblock2∕NCPB
where cinner is a proportionality constant, Nblock is the dimension of the matrix block making up the tridiagonal I.R.
Hamiltonian block matrix, and NCPB is the number of I.R. cores allocated per block. Constants accounting for
communications overhead can be neglected here. Run-time overhead per time step of the outer region scales as
runtime_per_step = couterNgridNchannels,
where couter is a proportionality constant, Ngrid is number of radial grid points per core, and Nchannels is the number
of channels. Equating the two quantities so that the I.R. and O.R. complete each step in comparable time duration gives
us the desired initial estimate for Ngrid:
Ngrid = (couter∕cinner)Nblock2NchannelsNCPB.
The ratio couter∕cinner is calculated by repeated trials of the RMT program. If the ratio couter∕cinner is independent of
parameters like Nchannels etc., then a knowledge of the ratio determines Ngrid for all parameter choices. Not
surprisingly, the ratio couter∕cinner does not turn out to be a true constant, but varies somewhat with changes in problem
parameters, and more substantially with changes in hardware. On HECToR, 1/15 is typical value for couter∕cinner.
Figure 1 shows some RMT timings with Nchannels = 101,Nblock = 673,NCPB = 5. In this case the optimal Ngrid
was about 60, and couter∕cinner = 1/15. In another set of benchmarks (not shown) Nblock = 430, significantly
decreasing the size of the arrays on the I.R. cores, (which improved the efficiency of the I.R. calculation through faster
memory access) so that the speed-up was somewhat greater than would be expected from linear scaling in the quantity
Nblock2. The optimal value for the ratio couter∕cinner was in this case about 1/12, due to the smaller cinner. Figure 1
demonstrates the degraded performance of RMT from MPI communications overhead as core counts approach 10,000.
Optimizing I.R./O.R. computation order: the red-black optimization
The RMT propagator is such that the wavefunction must be known in both regions at the start of any given time step,
i.e. effectively both regions synchronize at the start and at the end of each time step. The computation amounts to
calculating the Hamiltonian times the wavefunction. The I.R. can do its part independently of the O.R.,
but the O.R needs some wavefunction information from the I.R. to begin calculation. The first step then
is for the I.R. to send wavefunction information to the O.R.. The O.R. cores are idle until they receive
this data. When reception is complete, the O.R. begins calculation of H ΨII and the I.R. cores become
idle. The O.R. completes its first order propagation and sends information to the I.R.. At this stage the
I.R. can commence its first order propagation and the O.R. can commence its second order propagation
in parallel with the I.R., after which it sends more information to the I.R.. The higher the order of the
propagator, the higher percentage of this computation can be done in parallel (i.e., the more the I.R. can work
independently of the O.R.). This process repeats up to the maximum order of the Arnoldi propagator. (Arnoldi
propagators are used in both regions and the maximum propagation order is a parameter in the code.)
Finally the I.R. can complete its maximum order propagation, and the two regions can again synchronize.
We find that we can increase the degree to which the Inner and Outer regions work independently of each other by
dividing the I.R. into two independent sets of cores - which we call red and black cores. This optimization works by
allowing the red I.R. cores and the black I.R. cores to independently receive information from the O.R. In certain limits
this independence improves I.R. parallelism by allowing one set of cores to begin computation instead of sitting idle
awaiting the other set to synchronize with the O.R. As we show below, the availability if this option improves the
program’s ability to exploit large numbers of cores as well as the overall efficiency of the integration.
|
|
|
|
In Figures 2 and 3 the outer region overhead (per core) has been reduced to its ultimate minimum by using just 32 grid
points per core. The Hamiltonian assumes a maximum angular momentum Lmax = 23, so the inner region Hamiltonian
is a 24 x 24 block tridiagonal matrix. The number of cores over which the inner region is parallelized must therefore be
a multiple of 24. If the red-black optimization is enabled, then the number of inner region cores must be a multiple of
48.
Figures 2 and 3 plot the speed at which the RMT code can integrate the equations of motion. We see in Figure 2 that
adding additional cores to the inner-region results in a near linear speed-up up to about 240 I.R. cores. Above 240 I.R.
cores, the improvement in speed is negligible for the case in which the red-black decomposition is disabled, but
continues linearly (with a smaller proportionality constant) in the case in which red-black decomposition is enabled. At
about 580 cores, the integration with the red-black optimization enabled is a factor 1.45 times faster than that of
the disabled case. So the addition of 340 I.R. cores above the 240 core threshold (more than doubling
the number of inner region cores) yields an improvement of about 45 percent in speed. This may at first
glance seem disappointing, but it is both desirable and beneficial in the RMT code. In practice the outer
region will run on 1000’s or tens of 1000’s of cores. In the example in Figures 2 and 3, the total number of
cores (Inner + Outer) is 8192. If the outer region is using say 8192 cores, then the addition of 340 I.R.
cores is a highly inexpensive way to improve the run-time efficiency of the entire program by 45 percent.
Figures 2 and 3 show only up to about 600 I.R. cores. The tests were performed up to 1000 I.R. cores, but little or no
improvement was observed above 600 cores. The matrix computations that were parallelized by these 600 cores were
performed on matrices that were 552 x 552 in dimension. In some RMT problems, matrices up to 30,000 x 30,000 in
size have been used, and it is expected that in this case the addition of more than 600 cores will provide additional
speedup.
The results plotted in Figure 3 demonstrate that we can obtain even better parallelism by using a higher order (8th
order) propagator. In this case, with the red-black optimization enabled, speed is factor 1.7 times greater than that of
the disabled case. This is another fortunate result, because the Arnoldi propagator improves in overall
efficiency with order. More precisely, doubling the order of the Arnoldi propagator usually doubles the
run-time, but allows time-steps to more than double for a net gain in integration speed. In practice, the
highest order possible within the constraints of available memory is used. Order 12 to 16 is standard.
Optimizing communications between the Inner and Outer Regions
Each time step the Hamiltonian-wavefunction product is calculated numerous times, and each time it is calculated
information must be exchanged between the I.R. and the O.R. cores. Several approaches to improving the efficiency of
this process were investigated.
The second term on the right hand side of Eq. (2) must be calculated in the O.R. and then sent to the I.R.. As outlined
above, each I.R. core is responsible for a subsection of the matrix-vector multiplication, and therefore this O.R. data is
needed on all I.R. cores. As a possible optimization of this process we considered a new communications design using
MPI’s single-core to many-core collectives. These optimization attempts failed because they were incompatible with the
complicated parallelization and communications scheme arising from the new Red-Black optimization described above.
Another impediment to efficient inter-region communication was a large penalty that arose from the O.R. computation
of surface amplitudes for use by the I.R. Each time step a (potentially large) vector is repeatedly calculated in the O.R.
via a projection of each channel wavefunction’s radial derivative onto known time-independent surface amplitudes, and
sent to the I.R.. This computation was moved from the O.R. to the I.R. based on the observation that in the limit of
optimal load balancing, it is the I.R. that will be privileged with greater idleness, hence will have the spare CPU cycles
to devote to the calculation.
Originally we also proposed to reduce the size of the data packets transferred between the inner and outer regions, but
instead the modifications described in work package 2 resulted in a large increase in the size of these data packets.
Fortunately, this additional burden was removed by the following optimization: a single O.R. core was dedicated to the
data transfer, and any excess time remaining (compared to the run-time per step of other O.R. cores) was applied to
propagating the O.R. Hamiltonian over a reduced workload, so that it was exactly synchronized with the remaining
O.R.cores. Figure 1 shows the improvement (squares) in the speed of RMT with this optimization on 100 to 10,000
O.R. cores.
In certain limits, (for example in the limit of high nuclear charge Z) the finite-difference Outer Region integration
becomes excessively inefficient in comparison to the Inner Region time propagation. A straightforward enhancement to
the present propagation algorithm, yields significant improvements in efficiency, and can restore balance between the
Inner and Outer Regions in these limits. The difficulties are particularly acute when highly-stripped ions are modelled,
because of the need to make the grid point spacing small in these cases. In a typical problem, using HELIUM to model
a 2-electron atom with Z = 2, a choice of δr = 0.25 au proves satisfactory. By contrast, for He-like neon (a highly
stripped ion with Z = 10, and a charge of 8 e) we find that a δr = 0.025 au is a more satisfactory choice.
Unfortunately, the Outer Region (O.R.) requires integration time-steps δt that scale as 1∕δr2. In other words, if we
decrease δr by a factor of 10 from δr = 0.25 au to δr = 0.025 au, then we must decrease δt by a factor of 10000, and the
program runs (at least) 10000 slower. The difficulty arises because the highest energy eigenvalues of the
finite-difference Hamiltonian are of the order E = ℏ2k2∕2m where kmax2 = 10∕δr2. These high energy
eigenstates can be thought of to first approximation as the most energetic plane-waves that the grid can
support. They are unphysical excitations, and in general should contain no population. They tend to be
one, two or more orders of magnitude greater in energy that the physical plane-waves excited by the
laser pulse, (the plane-waves that represent ionizing electrons). For example, at δr = 0.25 au, the physical
excitations are rarely greater than 10 au in energy. But at δr = 0.25 au, the highest energy eigenvalues E on the
grid are observed to be of the order 100 au, (using typical integration parameters). At δr = 0.025 au, the
corresponding energies are of the order E = 10000 au. Unfortunately, the propagator must successfully
integrate the equations of motion as though these high-energy unphysical modes contain population.
Otherwise, spurious population accumulates in these modes through integration error - the integration becomes
unstable and fails catastrophically. In the explicit propagators used by HELIUM and RMT, stability is
regained as δt, the integration step size, is decreased to something of the order of the period of the highest
energy plane-wave supported by the finite-difference grid, which, as explained above scales as 1∕δr2.
The finite-difference portion of the RMT code is the outer region (O.R.) portion of the integration. The O.R. is very
typically a distance 20 au or more from the atomic core. At this distance the atomic Coulomb potentials arising from the
attractive forces between the ejected (ionizing) electron and the nuclear core, and the repulsive forces between the
ejected electron and the remaining electrons are relatively weak. The eigenvalues of the finite-difference Hamiltonian
are dominated by the Kinetic Energy operator K. The eigenspectrum of the Kinetic Energy operator K is in turn
dominated by that of the 2nd derivative operator. (The centripetal repulsion term falls off as the inverse square of r, and
makes a negligible contribution to the spectrum.) The electric field also influences the eigenspectrum. At typical field
intensities it may shift the field-free peak eigenvalues by something of the order 5-20 percent, but rarely
more. Except in the most extreme circumstances, the eigenspectrum of the outer region Hamiltonian is to
good first approximation that of the 2nd derivative operator appearing in K (multiplied by -0.5∕δr2).
We would expect then, that in the limit of small δr the integration step size δt is governed by the 1∕δr2 dependence of
the 2nd derivative finite-difference operator of the Kinetic Energy operator K. This is in fact what we observe in the
normal operation of the RMT code. Since both the inner region and outer region use the same step size δt, the behavior
of the eigenspectrum of K has a profound effect on the run-time efficiency of the RMT code. Developing methods of
mitigating the effect of the high eigenvalues of K has been the goal of workpackage 2. The originally
proposed method involved exponentiating K, or of an approximate K, independently of the remaining
parts of the Hamiltonian. The computational overhead of this method of this method proved to be greater
than the cost savings from the larger step size δt, so this method was abandoned. Instead we developed
a method of reducing the peak eigenvectors of K by using least-squares operators. The new technique
successfully reduces the peak eigenvalues of K by up to a factor of 4, and does so at very little additional
computational cost. In fact in most cases the additional computation is undetectable in the run-time of the RMT.
We turn now to a demonstration of the new technique, and discuss a case in which δt can be increased by a factor of 1.8
over that of the original code. The integration proceeds with same accuracy and stability as the original code, but 80
percent faster than the best speed possible by the original code. The new technique appears to be a nearly ideal solution
to the problem.
We begin by outlining the methods used to generate the least-squares finite-difference operators.
If function f(X) is written as an Nth order polynomial, or equivalently as a linear combination of N+1 orthogonal
polynomials Qj(X) of orders j = 0 to N, then finite-difference differentiation and integration rules can be derived by
taking derivatives and integrals of the polynomial representation of f(X). The use of orthogonal polynomials, as
described in the following, makes it easy to create a least-squares representation of f(X) and of finite-difference
differentiation and integration matrix operators.
Let f(X) be a linear combination of orthogonal polynomials Qn(X):
 | (5) |
Here the Cn are determined by projecting both sides of the above equation onto polynomial Qn(X). By the orthogonality of Q, (i.e. (Qm,Qn) = 0 if n≠m), we get
 | (6) |
The inner product (f,Qm) with respect weights Wj is defined:
 | (7) |
Notice we do not assume that the Q’s have been normalized. Inserting the value of Cn derived above into the polynomial expansion of f(X), and inverting the order of the sums over j and n gives the desired rule:
![∑N ∑N
f(X ) = f(Xj)[Wj (Qn(Xj )Qn(X )∕(Qn,Qn ))].
j=0 n=0](rmt_report_2011_614x.png) | (8) |
The sum over j is over data points Xj. The sum over n is over polynomials Qn. To interpolate, integrate or differentiate
f(X), we use its polynomial representation, given by equation 8 above. For example, differentiation of both sides of the
above formula yields a rule for taking the derivatives of f(X).
A sum of N+1 orthogonal polynomials, up to order N, will exactly approximate any tabular function of N+1
points f(X0),f(X1),...f(XN). If the sum is truncated to less than N+1 polynomials, then the result is a
least-squares fit to these points. Generally we throw out the high order polys, QN,QN-1,... because
they contain the highest frequency components of f(X), (the components that rapidly oscillate as X
varies).
As an example, we now write down the steps used to create a least-squares finite-difference 1st derivative of f(X). Differentiating Equation 8 on both sides of the equality gives:
![′ N∑ ∑N ′
f(X ) = f(Xj)[Wj (Qn (Xj )Qn (X )∕(Qn, Qn))].
j=0 n=0](rmt_report_2011_615x.png) | (9) |
The finite-difference differentiation rule at point Xk is the set of numbers in brackets [], which we call Rule(j):
 | (10) |
With this definition, equation 9 becomes a finite-difference rule for differentiation at Xk:
 | (11) |
To generate the orthogonal polynomials Q and the derivatives of Q, the Gram-Schmidt recurrence relation is
used.
 | (12) |
 | (13) |
The sum on the RHS was added to make Qm orthogonal to all previous Q’s. The coefficients Bmj that guarantee orthogonality are:
 | (14) |
where (P1,P2) denotes the weighted inner-product defined above. To see this take the inner product of the equation for Qm with Qj, assuming j < m, set it equal to zero, and use recursion. The form given above is the one that generalizes to many dimensions. In one dimension the formula simplifies so that only two of the B coefficients are nonzero. We call these coefficients Am and Bm:
 | (15) |
 | (16) |
 | (17) |
where
 | (18) |
 | (19) |
Differentiating both sides of the above recurrence relations for Q(X) gives the desired recurrence relations for the
higher order derivatives of Q(X).
|
|
|
|
|
|
|
|
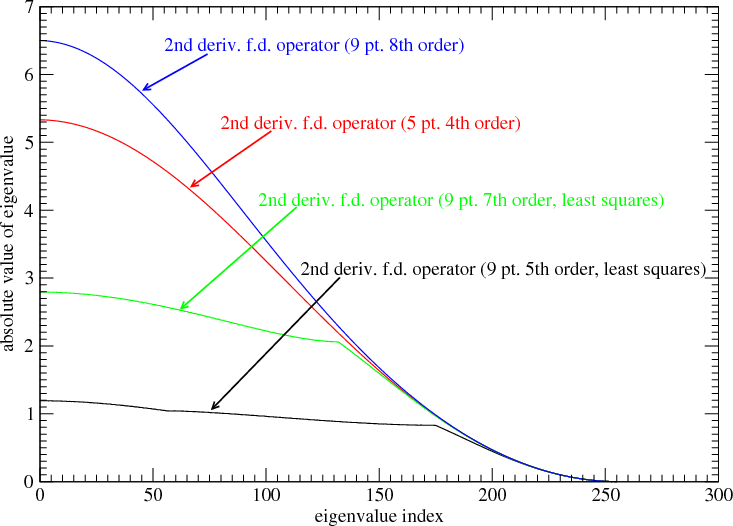
Figure 4 shows the eigen-spectra of two least-squares finite-difference operators along with the eigen-spectra of two
non least-squares operators.
The eigenvectors in this example are to good approximation sinusoids. In the limit of infinitely small
grid-point spacings, the operator becomes  and its eigenvectors approach exp(ikr), with eigenvalues
-k2:
and its eigenvectors approach exp(ikr), with eigenvalues
-k2:
 | (20) |
In Figure 4, ”order” refers to the order of the polynomial used to calculate the 2nd derivative. For example, in the case
of the 9 point rule, the non least-squares operator is 8th order. In other words, an 8th order polynomial is chosen
such that it passes through each of the 9 points. The 9 point rule returns the exact 2nd derivative of this
polynomial at the central point. An 8th order polynomial is the lowest order polynomial that can in general pass
through any arbitrarily chosen 9 points. The least-squares rules use polynomials of order less than 8. These
polynomials do not in general pass through each of the 9 points. For this reason they are less sensitive to
numerical noise that accumulates during the numerical integration of functions that can be described as linear
combinations of exp(ikr). It is apparent that the least-squares process can dramatically truncate the higher
frequency components of the eigen-spectrum without significantly changing the low frequency components.
Figure 5 shows the resulting reduction in peak eigenenergies when the least-squares finite-difference operators
described above are substituted into the RMT outer region Hamiltonian. The peak eigenvalues shown in Figure 5 are not
physical excitation of the atomic system. The highest eigenvalues shown in Fig. 5 are 10 to 100 times larger in energy
than the energies of the electrons excited by the laser. They are numerical artifacts of the finite-difference grid. By
suppressing them, we can can use larger integration step-sizes δt while maintaining both stability and accuracy.
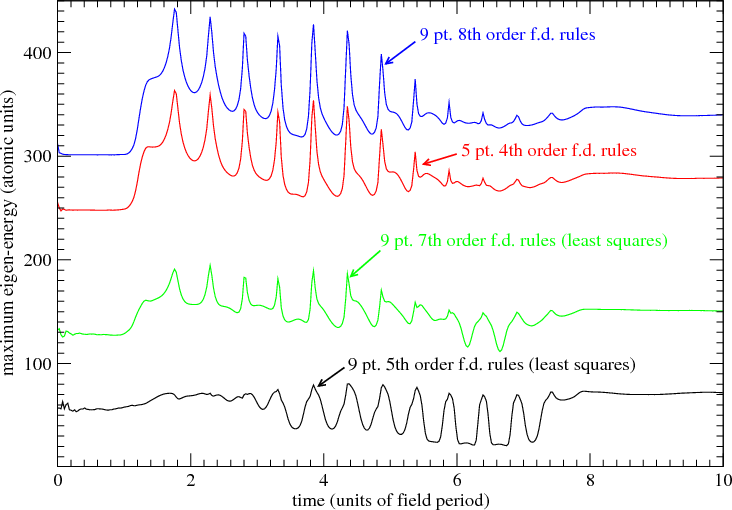
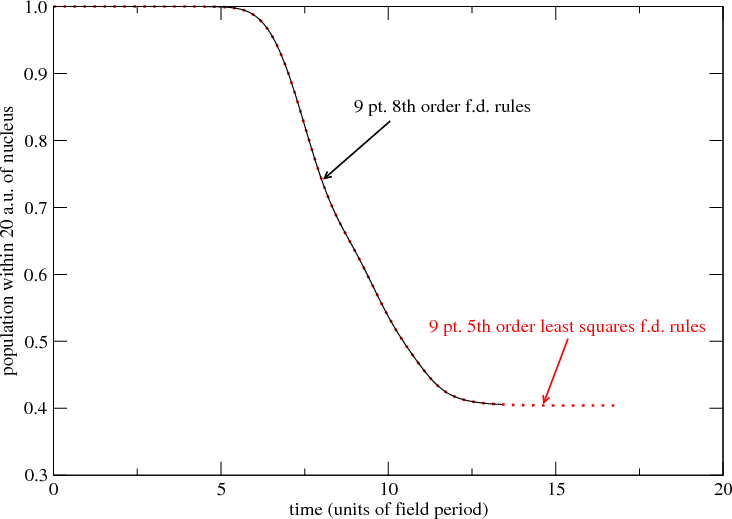
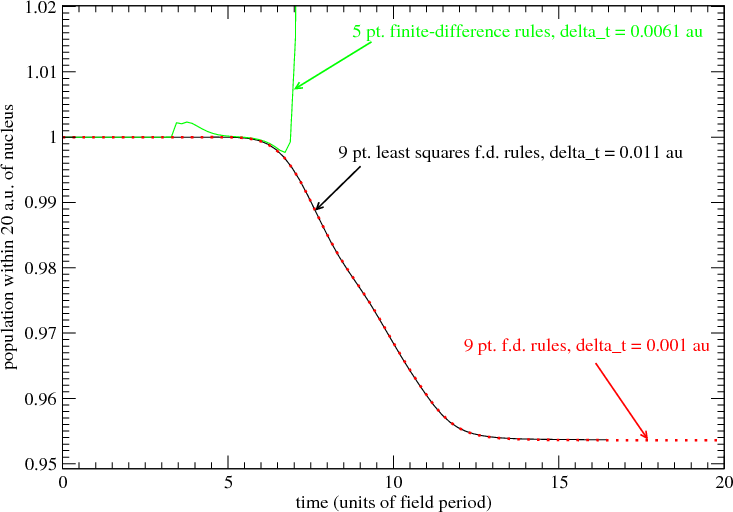
Figure 6 demonstrates that the least-squares rules give the same answers as the non least-squares rules.
Figure 7 demonstrates that the 9 point least-squares operator enables integration step-sizes significantly larger than
step-sizes possible with the non least-squares 5 point rule. The 5 point rule results in a catastrophic integration failure at
a rather small δt. The failure is due to instability in the integration that becomes apparent at δt = 0.0061 au. For all
larger δt, the instability worsens. The integration using least-squares finite-difference rules (9 point, 5th order, black
line) is stable and accurate at δt = 0.011 au. (In these two examples the grid point spacing is δr = 0.05 au.) Results using
a smaller grid point spacing δr = 0.001 au, along with the most accurate of the finite-difference rules (red line: 9
point, 8th order) are presented in order to verify the accuracy of the 9 point least-squares rule (black line).
One of the nice features of this approach is the good run-time efficiency of the 9 point rules. On tests of RMT on
HECToR, the 9 point rules were nearly as fast as the 5 point rules. It was in fact difficult to detect a difference. This is
evidently due to the fact that much of the overhead of the finite-difference computation is in the access of the large
wavefunction arrays from memory (rather than in the floating point ”*” and ”+”). This memory fetch overhead is the
same for the 9 and 5 point rules. And although the 2nd derivative operator is the cause of the unphysically large
eigenvalues of the Hamiltonian, it has a small computational cost in comparison to all the other operators in
the Hamiltonian. For this reason, the 9 point RMT runs as fast as the 5 point RMT, and we find that the
ability to increase δt by a factor 1.8 directly translates into a factor 1.8 increase in integration speed.
Acknowledgements:
This project was funded under the HECToR Distributed Computational Science and Engineering (CSE)
Service operated by NAG Ltd. HECToR - A Research Councils UK High End Computing Service - is
the UK’s national supercomputing service, managed by EPSRC on behalf of the participating Research
Councils. Its mission is to support capability science and engineering in UK academia. The HECToR
supercomputers are managed by UoE HPCx Ltd and the CSE Support Service is provided by NAG Ltd.
| 1. van der Hart HW, Lysaght MA & Burke PG Phys. Rev. A 76 043405 (2007). 2. van der Hart HW, Lysaght MA & Burke PG Phys. Rev. A 77 065401 (2008). 3. Guan X, Noble CJ, Zatsarinny O, Bartschat K & Schneider BI Phys. Rev. A 78 053402 (2008). 4. Lysaght MA, Burke PG & van der Hart HW Phys. Rev. Lett. 101 253001 (2008). 5. Lysaght MA, van der Hart HW & Burke PG Phys. Rev. A 79 053411 (2009). 6. Lysaght MA, Burke PG & van der Hart HW Phys. Rev. Lett. 102 193001 (2009). 7. van der Hart HW & Burke PG (the adaptation); Burke VM, Noble CJ, Plummer M & Burke PG (RMATRIXII/RM95): both to be submitted to Comput Phys Comm. 8. Nikolopoulos LAA., Parker JS & Taylor KT Phys. Rev. A 78 063420 (2008). 9. Lysaght MA, Moore LR, Nikolopoulos LAA, Parker JS, van der Hart HW & Taylor KT, ’Ab initio methods for few- and many-electron atomic systems in intense short-pulse laser light’ Quantum Dynamic Imaging: Theoretical and Numerical Methods, editors. A.D. Bandrauk and M. Ivanov, to appear (Springer) (2010). 10. Moore LR, Lysaght MA, Nikolopoulos LAA, Parker JS, van der Hart HW & Taylor KT, submitted to J. Mod. Opt. (2010). 11. Smyth ES, Parker JS & Taylor KT Comput Phys Comm 144 1 (1998). 12. Parker JS, Doherty BJS, Taylor KT et al Phys Rev Lett 96 133001 (2006). 13. Cavalieri AL et al Nature 449 1029 (2007). 14. Uiberacker M et al Nature 446 627 (2007). 15. Drescher M et al Nature 419 803 (2002). 16. Mauritsson J et al Phys Rev Lett 100 073003 (2008). |