Next: Parallel Adaptivity Up: Background Previous: Fluidity
Dynamic adaptive remeshing, hereafter known as adaptivity, is a process of adapting the mesh according to an error, which is a function of the current model state and user-defined functions. This allows the a posteriori metric to be used to alter the mesh as the simulation proceeds. Once a posteriori metrics have been computed, there are many possible ways of modifying the discretisation to achieve some error target. These include h-adaptivity, which changes the connectivity of the mesh Berger1989; p-adaptivity, which increases the polynomial order of the approximation Babuvska1994; and r-adaptivity, which relocates the vertices of the mesh while retaining the same connectivity Budd2009. Combinations of these methods are also possible (e.g., Houston2001,Ledger2003).
Fluidity uses a powerful combination of hr-adaptivity, since the meshes produced are not constrained by the previous mesh; therefore, this approach allows for maximum flexibility in adapting to solution features. However, this flexibility comes at a cost: guiding the adaptive remeshing procedure (choosing what mesh to construct), executing the adaptation (constructing the chosen mesh) and data transfer of solution fields (from the previous mesh to the newly adapted mesh) become more complicated than with hierarchical refinement.
The metric, M, on which adaptivity is carried out is calculated as follows. For each field,
fi to be included in the metric, metrics:
| (1) |
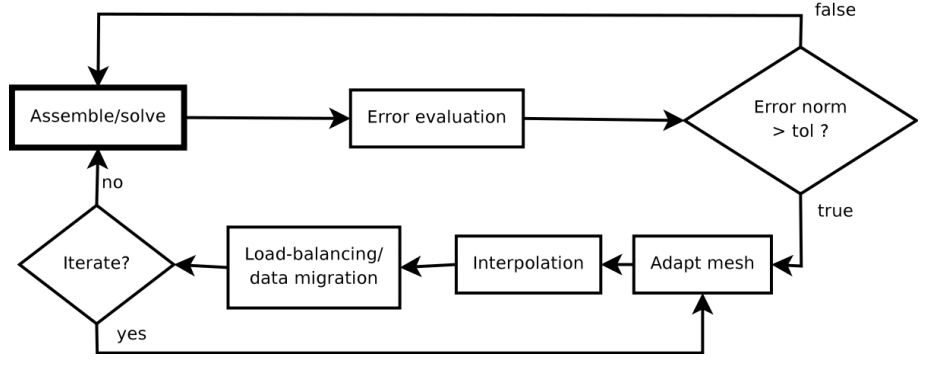
The adaptive algorithm carries out the following stages (also see Fig 2):
More details of the algorithm and the methods employed can be found in the Fluidity manual and [Farrell et al.(2009)Farrell, Piggott, Pain, Gorman and Wilson]
Jon Hill 2012-03-02